独立的缓冲区–LRU块缓存
1.操作方式
- 为什么采用LRU?
LRU代表最近最少使用(least recently used),指的是一种一般方法,可用于有效管理一个集合中最常使用的那些成员。如果经常访问一个数据元素,则该元素很可能位于物理内存中(因而被缓存)。较不常用或很少使用的数据元素,将随时间的推移,逐渐自动退出缓存。 - 实现基本原理:
上一次使用的数据元素,将由内核自动放置到LRU列表的第一个位置上。如果缓存中已经有数据元素,则只改变各个元素的位置。如果该数据元素是从块设备读取的,则将数组的最后一个元素退出缓存,从内存中释放。
2.实现–数据结构
数据结构
实现的起点是bh_lru结构,其定义如下:
fs/buffer.c#define BH_LRU_SIZE 8struct bh_lru {struct buffer_head *bhs[BH_LRU_SIZE];};static DEFINE_PER_CPU(struct bh_lru, bh_lrus) = ;
bhs是一个缓冲头指针的数组,用作实现LRU算法的基础(按定义所示,其中包括8个数据项)。内核使用DEFINE_PER_CPU,为系统的每个CPU都建立一个实例,改进对CPU高速缓存的利用率。
3.实现–两个公开的函数(通过内核提供)
- lookup_bh_lru检查所需数据项是否在缓存中:
/** Look up the bh in this cpu's LRU. If it's there, move it to the head.*/static struct buffer_head *lookup_bh_lru(struct block_device *bdev, sector_t block, unsigned size){struct buffer_head *ret = NULL;struct bh_lru *lru;unsigned int i;check_irqs_on();//如果定义了关中断,则关闭中断bh_lru_lock();//加锁,实质是关闭本地中断lru = &__get_cpu_var(bh_lrus);//根据当前CPU选择对应的数组for (i = 0; i < BH_LRU_SIZE; i++) {struct buffer_head *bh = lru->bhs[i];//条件成立即表示所需数据在缓存中if (bh && bh->b_bdev == bdev &&bh->b_blocknr == block && bh->b_size == size) {if (i) {//i为0,则不需要做任何操作while (i) {//将i前的所有数组元素都往右一个下标lru->bhs[i] = lru->bhs[i - 1];i--;}//将数组的首元素置为所查找的数据项lru->bhs[0] = bh;}get_bh(bh);ret = bh;break;}}bh_lru_unlock();return ret;}
- bh_lru_install将新的缓冲头添加到缓存中:
/** The LRU management algorithm is dopey-but-simple. Sorry.*/static void bh_lru_install(struct buffer_head *bh){struct buffer_head *evictee = NULL;struct bh_lru *lru;check_irqs_on();bh_lru_lock();lru = &__get_cpu_var(bh_lrus);if (lru->bhs[0] != bh) {//查找新的数据项是否一致lru列表的首项中,不在则继续struct buffer_head *bhs[BH_LRU_SIZE];//新定义一个与lru列表相同的数组,作为临时数组,作拷贝之用int in;int out = 0;get_bh(bh);//将bh的引用计数器加1,原子操作bhs[out++] = bh;//将临时数组的首元素置为新的缓冲头,out此时值为1for (in = 0; in < BH_LRU_SIZE; in++) {//获得lru列表中的每一个元素struct buffer_head *bh2 = lru->bhs[in];//如果lru列表中有一项与新的缓冲头相同,则释放该项(其实是将其引用计数器减1),并重新循环if (bh2 == bh) {__brelse(bh2);} else {if (out >= BH_LRU_SIZE) {//此处为true说明lru已经满了,故而应该删除列表的最后一项(根据LRU原则,将lru列表的最后一项赋给eviotee,后面会被释放)BUG_ON(evictee != NULL);evictee = bh2;} else {//将lru列表中的元素拷贝到临时数组中bhs[out++] = bh2;//out总比in大1}}}while (out < BH_LRU_SIZE)bhs[out++] = NULL;//将临时数组的最后一个有用项之后一项赋为null,为memcpy做准备。memcpy(lru->bhs, bhs, sizeof(bhs));}bh_lru_unlock();//释放原lru列表的最后一项if (evictee)__brelse(evictee);}
4.接口函数
注意:如果lookup_bh_lru失败,不会自动从块设备读取所需的块。而是通过下列接口函数完成:
普通的内核代码通常不会接触到bh_lookup_lru或bh_lru_install,因为二者被封装起来。内核提供了通用例程来访问各个块,它们自动涵盖了块缓存,使得没必要与块缓存进行显式交互。这些例程包括__getblk和__bread。
两个函数的相同点:
- 函数原型相同,可以这样描述:
typedf struct buffer_head (get_read)(struct block_device *bdev, sector_t block, unsigned size);get_read* __getblk;get_read* __bread;
数据块可通过所在块设备的block_device实例、扇区编号(sector_t类型)和块长度唯一标识。
两个函数的不同点(不同点与两个函数的目标有关):
- __bread保证返回一个包含最新数据的缓冲区。这导致在必要的情况下,需要读取底层块设备。
- 调用__getblk总是返回一个非NULL指针(即一个缓冲头)。如果所要缓冲区的数据已经在内存中,则返回数据,但不保证数据的状态。与__bread相比,数据可能不是最新的。而另一种可能性是,缓冲区对应的块尚未读入内存。在这种情况下,__getblk确保分配数据所需的内存空间,并将缓冲头插入到LRU缓存。
5.__getblk函数
因为__bread会调用__getblk,所以我们先看一下__getblk的代码流程图:
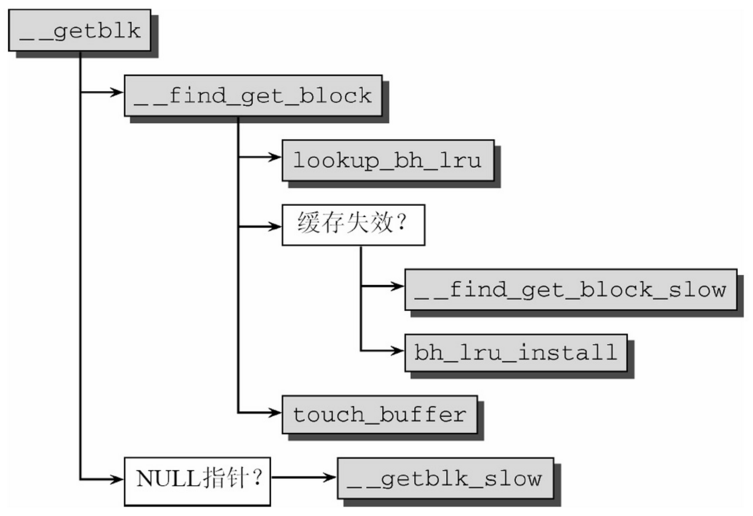
在执行__getblk时有两条执行路径:
1)调用__find_get_block使用如下所述的方法来查找所要的缓冲区。如果查找成功则返回一个buffer_head实例。否则,任务委托给__getblk_slow。
2)__getblk_slow能产生所要的缓冲区,但用时比__find_get_block长。但该函数能够保证总是可以返回一个适当的buffer_head实例并为数据分配内存空间。
最后,__getblk函数使用bh_lru_install将其将缓冲头插入到块缓存,而touch_buffer对与缓冲区相关的页调用了mark_page_accessed方法(参见第18章)。
代码如下:
struct buffer_head *__getblk(struct block_device *bdev, sector_t block, unsigned size){struct buffer_head *bh = __find_get_block(bdev, block, size);might_sleep();if (bh == NULL)//__find_get_block发挥null,则进入__getblk_slow,该函数保证至少会分配缓冲头和实际数据所需的内存空间。bh = __getblk_slow(bdev, block, size);return bh;}EXPORT_SYMBOL(__getblk);
struct buffer_head *__find_get_block(struct block_device *bdev, sector_t block, unsigned size){//调用lookup_bh_lru函数,检查所需的块是否已经在LRU缓存中struct buffer_head *bh = lookup_bh_lru(bdev, block, size);if (bh == NULL) {//__find_get_block_slow函数试图在页缓存中查找该数据bh = __find_get_block_slow(bdev, block);/*__find_get_block_slow试图在页缓存中查找该数据,这可以产生两个不同的结果:1)如果数据不在页缓存中,或虽然在页缓存中,但对应的页没有与之关联的缓冲区,则返回一个NULL指针;2)如果数据在页缓存中,且对应页有相关的缓冲区,则返回指向所要缓冲头的指针。*/if (bh)//如果根据上述函数找到了缓冲头,则调用bh_lru_install函数将其添加到缓存。bh_lru_install(bh);}if (bh)//所需块已经在LRU缓存中//touch_buffer会调用mark_page_accessed将该页标记为与缓存关联之后,内核返回到__getblk。touch_buffer(bh);return bh;}
static struct buffer_head *__getblk_slow(struct block_device *bdev, sector_t block, int size){//...for (;;) {//无限循环,内核试图反复在内存中创建数据结构,直至成功struct buffer_head * bh;int ret;//再次调用__find_get_block函数,但是刚才明明已经调用失败,为何这样做?/*原因:只有在与此同时有另一个CPU建立了所需的缓冲区,并在内存中创建了对应的数据结构时,这一次函数调用才会成功。尽管这不太可能,但仍然必须检查。*/bh = __find_get_block(bdev, block, size);if (bh)return bh;//如果这次调用成功(找到缓冲头),则返回。//不成功,内核则调用grow_buffers,试图为缓冲头和实际数据分配内存,//并将该内存空间添加到内核的数据结构。ret = grow_buffers(bdev, block, size);//调用grow_buffers会返回三种结果:/*(1)如果成功(ret>0),则再次调用__find_get_block,这一次会返回所要所要的buffer_head。(2)如果对grow_buffers的调用返回负值,这意味着块超出了页缓存索引的范围,此时将放弃循环,因为目标块在物理上是不存在的。(3)如果grow_buffers返回0,这意味着内存不足,无法增加缓冲区,接下来调用free_more_memory试图释放更多的物理内存来改善这种状况*/if (ret < 0)return NULL;if (ret == 0)free_more_memory();}}
grow_buffers在进行一些正确性检查之后,它将工作委托给grow_dev_page函数,grow_dev_page函数的代码流程图如下:
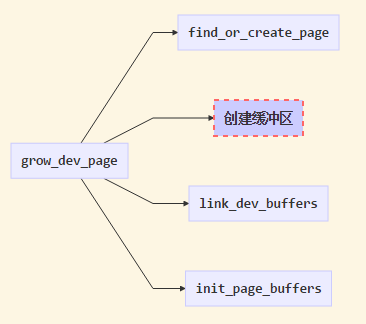
解释:
1)find_or_create_page查找一个适当的页或创建一个新页,来保存数据。内存不足则返回NULL指针。
2)如果页已经与长度正确的缓冲区相关联,通过init_page_buffers来修改剩余的缓冲区数据(b_bdev和b_blocknr),那么grow_dev_page就无事可做,可以退出。
3)否则,使用alloc_page_buffers生成一组新的缓冲区,使用link_dev_buffers函数关联到页。而init_page_buffers用来填充缓冲头的状态(b_status)和管理数据(b_bdev、b_blocknr)。
6.__bread函数
与__getblk函数不同,__bread确保返回一个数据最新的缓冲区。其实现代码如下:
struct buffer_head *__bread(struct block_device *bdev, sector_t block, unsigned size){//调用__getblk,确认缓冲头和实际数据所需的内存空间都已经就位。struct buffer_head *bh = __getblk(bdev, block, size);if (likely(bh) && !buffer_uptodate(bh))//缓冲的数据不是最新的//__bread_slow向块层提交一个请求,在物理上读取数据,并等待操作完成。//接下来,在缓冲区的数据保证为最新之后,返回缓冲头指针。bh = __bread_slow(bh);return bh;//如果缓冲的数据已经是最新的,则返回指向缓冲头的指针。}
7.在文件系统中的使用
内核中需要用到按块读取的方式的场景不多,但是用到处都很重要。特别是,文件系统在读取超级块或管理块时利用了上述的两个例程。
内核定义了两个函数,以简化文件系统处理单个块的工作:
<buffer_head.h>sb_bread(struct super_block *sb, sector_t block){return __bread(sb->s_bdev, block, sb->s_blocksize);}static inline struct buffer_head *sb_getblk(struct super_block *sb, sector_t block){return __getblk(sb->s_bdev, block, sb->s_blocksize);}
从代码中可以看出,用于读取特定文件系统的例程使用了一个超级块、一个块号和一个块长度作为参数。